Abstract
Bimanual robot learning from demonstrations is fundamentally limited by the cost and narrow visual diversity of real-world data, which constrains policy robustness across viewpoints, object configurations, and embodiments. We present Canny-guided Robot Data Generation using Video Diffusion Transformers (CRAFT), a video diffusion-based framework for scalable bimanual demonstration generation that synthesizes temporally coherent manipulation videos while producing action labels.
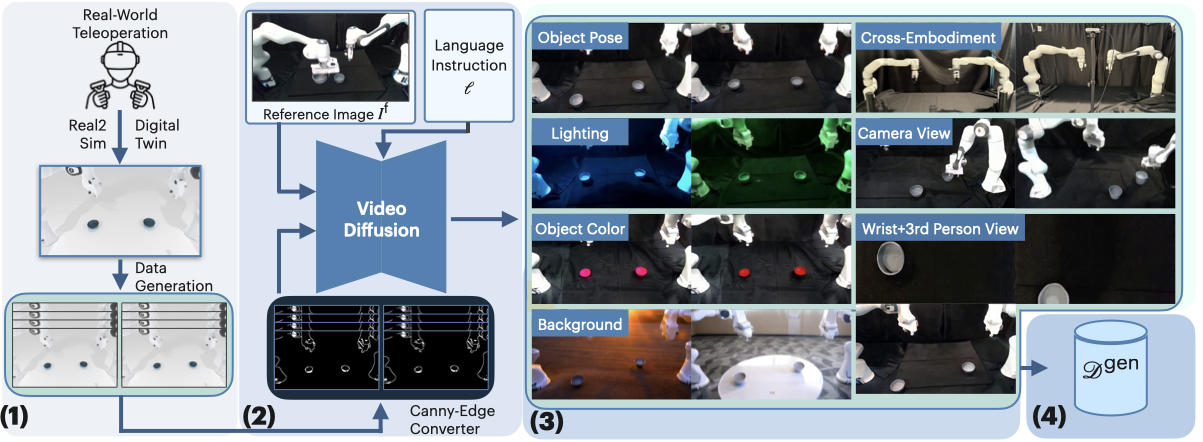
By conditioning video diffusion on edge-based structural cues extracted from simulator-generated trajectories, CRAFT produces physically plausible trajectory variations and supports a unified augmentation pipeline spanning object pose changes, lighting and background variations, cross-embodiment transfer, and multi-view synthesis.
We leverage a pre-trained video diffusion model to convert simulated videos, along with action labels from the simulation trajectories, into action-consistent demonstrations. Starting from only a few real-world demonstrations, CRAFT generates a large, visually diverse set of photorealistic training data, bypassing the need to replay demonstrations on the real robot (Sim2Real).
Across simulated and real-world bimanual tasks, CRAFT improves success rates over existing augmentation strategies and straightforward data scaling, demonstrating that diffusion-based video generation can substantially expand demonstration diversity and improve generalization for coordinated dual-arm manipulation.